
10月19日-25日,2025年智能机器人与系统国际会议(The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems,简称 “IROS 2025”),在杭州国际博览中心召开。RaHAIC团队成员赵振杰(副教授)、张世勇(博士后)、周洪玉(硕士生)参加会议并在会上分享最新研究成果。在本次IROS 2025会议上,RaHAIC团队共2篇论文、1篇workshop poster被接收。具体情况如下:
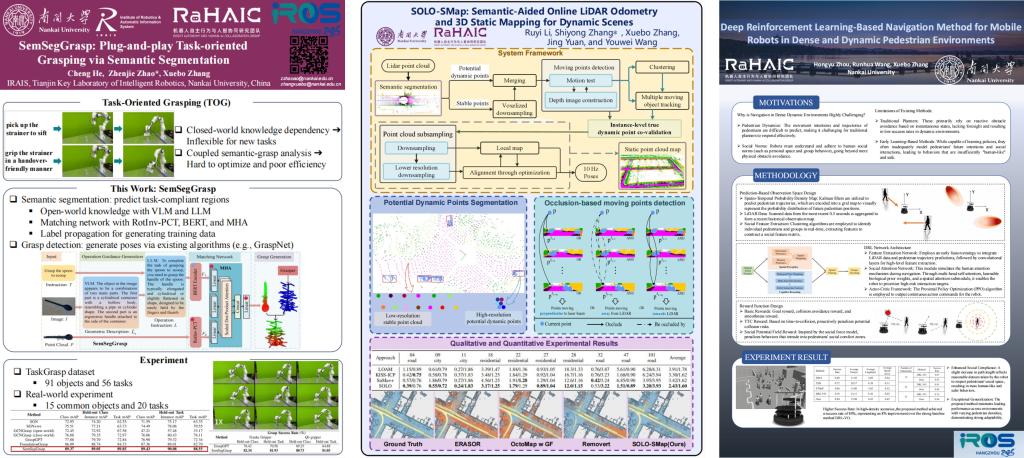
第一篇:SemSegGrasp:基于语义分割的即插即用面向任务抓取
面向任务抓取(TOG)根据自然语言指令生成物体特定部位抓取点以完成目标任务,是人机协同操作的基础任务。现有方法通常将语义分析与抓取检测绑定在一起,效率低、泛化能力有限。为此,本文提出SemSegGrasp——将TOG分解为语义分割和抓取检测两个独立过程,显著提升了模型运行速度和泛化性能;同时,该方法还能以即插即用方式与任何抓取检测算法结合使用。在语义分割阶段,SemSegGrasp首先通过视觉语言模型(VLM)生成目标物体的局部几何描述,随后将描述信息与自然语言指令同时输入大语言模型(LLM)中得到操作序列。进一步,分别对输入点云和操作序列进行特征编码,并利用多头交叉注意力机制进行特征匹配,预测各点作为TOG抓取点的概率,实现语义分割。最后通过标签传播方法融合分割结果与抓取检测算法生成的候选抓取点,得到TOG抓取点及姿态信息。SemSegGrasp在公开数据集TaskGrasp和真实场景中均有大幅性能提升(5%-10%),有力推动了视觉语言动作融合技术落地应用。
C. He, Z. Zhao*, and X. Zhang. "SemSegGrasp: Plug-and-play Task-oriented Grasping via Semantic Segmentation", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
第二篇:SOLO-SMap:一种面向动态场景的语义辅助在线激光雷达里程计与三维静态建图方法
精确且可靠的在线实时定位与建图是机器人自主导航的关键。感知视场内的动态物体会影响点云配准与定位的精度,并在地图中引入“鬼影”伪影,从而阻碍机器人的(路径)规划与决策。尽管语义分割有助于感知物体类别,但它难以精确分割运动中的物体。本文提出了一种仅依赖激光雷达点云的实时定位与静态地图构建框架,利用语义推断来识别潜在的动态点。我们通过利用基于运动点遮挡关系的几何规则以及邻近时间窗口内的多目标跟踪,实现了实例级的真实动态点移除。我们在KITTI数据集和自建数据集的动态场景中评估了SOLO-SMap的性能,并与其他方法进行了全面比较,验证了所提方法的有效性和鲁棒性。
R. Li, S. Zhang*, X. Zhang, J. Yuan and Y. Wang, "SOLO-SMap: Semantic-Aided Online LiDAR Odometry and 3D Static Mapping for Dynamic Scenes", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
第三篇:面向密集动态行人环境的移动机器人深度强化学习导航方法
尽管现有的导航方法在简单环境中表现良好,但它们在密集、动态的行人场景中往往难以兼顾安全性、效率与社交合规性。为此,本文引入了一种创新的深度强化学习框架,旨在解决机器人对行人未来轨迹的预测及其社交意图的理解问题。本文提出了一种融合时空概率密度图与仿生社交注意力网络的新方法,提升机器人在人群中的导航成功率与社交合规性。在35人的高密度动态环境中,所提方法的导航成功率相较于主流方法提升超过8%。我们相信这项工作将为服务机器人在复杂现实场景中的可靠部署提供新的解决方案。
H. Zhou, R. Wang*, X. Zhang, "Deep Reinforcement Learning-Based Navigation Method for Mobile Robots in Dense and Dynamic Pedestrian Environments", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), workshop, 2025.
据悉,IROS是机器人领域的顶级会议,距今已有38年的历史。本次会议是IROS自1988年创办以来,第三次在中国境内举办,前两次分别是2006年北京、2019年澳门。本次大会以“人机协作前沿”为核心议题,吸引了来自全球60多个国家和地区的约3500余名专家学者前来研讨分享、4400余名领域学生前来交流学习,亦有300余位企业代表参与到会议展示中,创下IROS历届参会人数新高。通过参与本次会议,团队师生加强了与学术同行的交流,拓展了学术视野,进一步提升了研究团队在国内外相关研究领域的影响力。