6月1日-5日,2026年国际机器人与自动化会议( IEEE International Conference on Robotics and Automation,简称 “ICRA 2026”),在维也纳国际博览中心召开。RaHAIC团队成员李浥晨(博士)、董千里(博士)、高海明(博士已毕业)参加会议并在会上分享最新研究成果。在本次ICRA 2026会议上,RaHAIC团队共4篇论文被接收。具体情况如下:
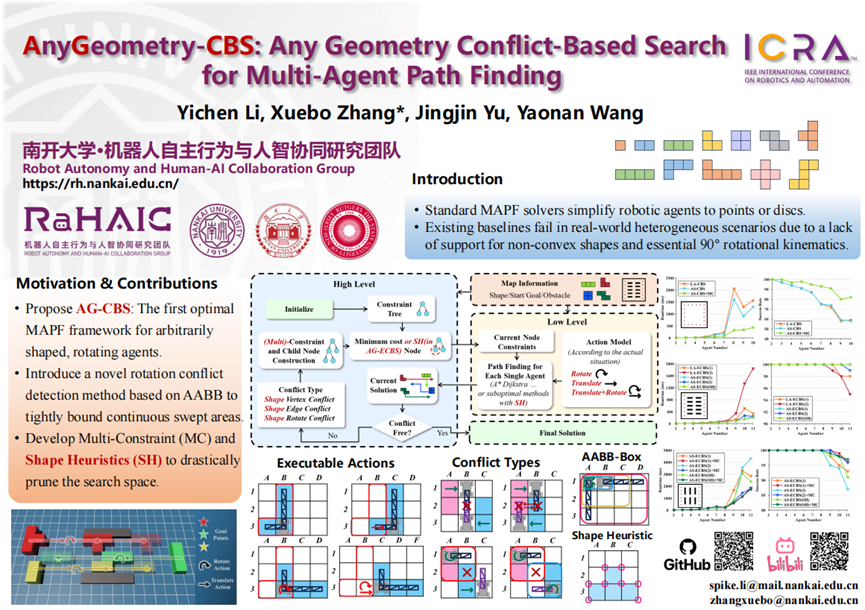
AnyGeometry-CBS:一种面向任意几何形状旋转智能体的多智能体路径规划方法
本文提出了一种能够容纳任意非凸几何形状且支持旋转动作的多智能体路径规划框架 AnyGeometry-CBS (AG-CBS) 。该方法通过将智能体表示为一组网格细胞来逼近其真实的物理轮廓,并引入了包含形状顶点、形状边缘和形状旋转冲突的扩展冲突定义 。为了提高高层搜索的效率,我们设计了一种多约束(MC)技术,在冲突发生时前瞻性地提前避免未来可能发生的同类型冲突 。此外,针对时间敏感的实时应用,我们引入了有界次优变体,并提出了一种利用智能体边界和面积等几何形状信息指导搜索的形状启发式(SH)函数 。我们在多种紧凑的网格地图和仓储场景中评估了 AG-CBS 及其变体的性能,实验结果表明,该方法比最优基线方法最多可减少 84.43% 的运行时间,在次优变体中可减少 88.24% 的时间,充分验证了所提方法在解决复杂几何形状 MAPF 问题中的有效性和高效率 。
Yichen Li , Xuebo Zhang*, Jingjin Yu, Yaonan Wang, “AnyGeometry-CBS: Any Geometry Conflict-Based Search for Multi-Agent Path Finding” , IEEE International Conference on Robotics and Automation (ICRA) 2026.
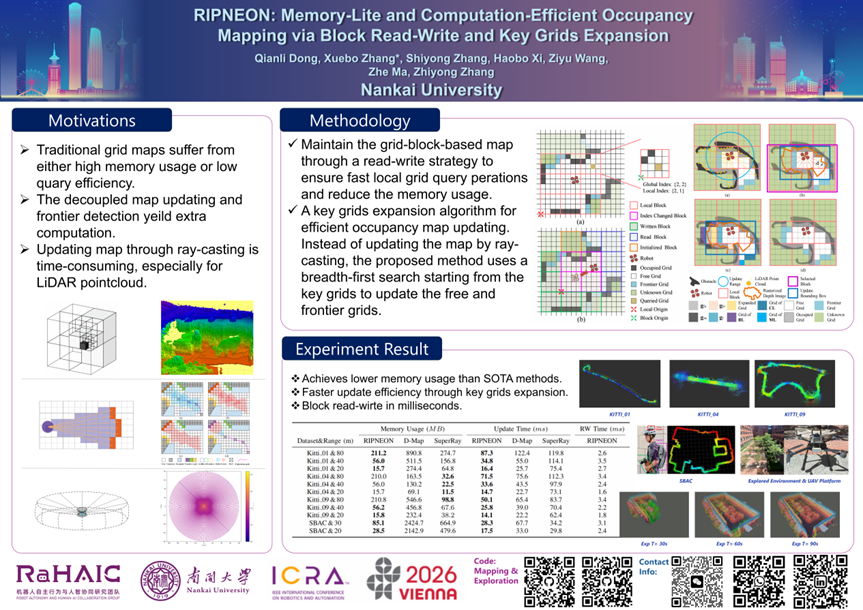
针对移动机器人在大范围环境中的LiDAR建图任务,现有栅格占据地图方法存在内存占用高、更新计算开销大的问题。为此,本文提出RIPNEON——一种轻量化、计算高效的占据建图算法。该方法采用网格块作为基本数据结构,并设计了基于传感器位置的动态块读写策略,仅维护传感器周围的局部块,从而显著降低内存使用并保证O(1)的查询效率。在占据更新方面,RIPNEON摒弃了传统耗时的光线投射算法,提出关键栅格扩展方法:在每个块中维护占据栅格与前向边界栅格两个关键栅格列表,基于深度图像和广度优先搜索从关键栅格出发递归扩展,同时完成自由空间更新与前向边界检测,避免了重复的栅格查询。实验表明,在KITTI数据集和自采数据集上,RIPNEON相比现有方法内存占用降低23.1%-94.1%,更新效率提升5.7%-78.3%,并在真实无人机自主探索任务中验证了其有效性。该方法为LiDAR驱动的机器人探索规划提供了高效、可扩展的建图支撑。
Qianli Dong, Xuebo Zhang*, Shiyong Zhang, Haobo Xi, Ziyu Wang, Zhe Ma and Zhiyong Zhang, “RIPNEON: Memory-Lite and Computation-Efficient Occupancy Mapping via Block Read-Write and Key Grids Expansion,” IEEE International Conference on Robotics and Automation (ICRA) 2026.
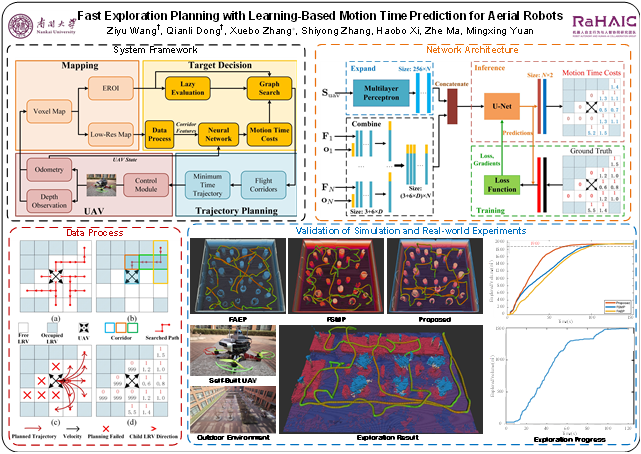
无人机自主探索未知三维环境在搜索救援、环境监测和地质勘探等任务中具有重要应用价值。现有探索规划方法通常采用路径长度、速度变化等粗略指标评估候选视点的运动代价,难以准确反映无人机当前状态和环境约束,容易造成频繁加减速和目标选择不一致,从而降低探索效率。为此,本文提出一种基于学习的运动时间预测方法,实时估计无人机到达各候选视点的运动时间代价。该方法以无人机当前状态和周围环境的飞行走廊特征为输入,通过深度神经网络预测候选区域的可行性与到达时间,并进一步结合自适应上界约束和 Dijkstra 搜索实现高效的最优探索目标决策。最后,系统根据选定目标生成安全、平滑且满足动力学约束的最小时间轨迹。仿真和真实无人机实验表明,该方法能够显著提升探索效率和平均飞行速度,在复杂三维环境中实现更快速、稳定的自主探索。
Z. Wang†, Q. Dong†, X. Zhang*, S. Zhang, H. Xi, Z. Ma, and M. Yuan, “Fast Exploration Planning with Learning-Based Motion Time Prediction for Aerial Robots”, IEEE International Conference on Robotics and Automation (ICRA), 2026.
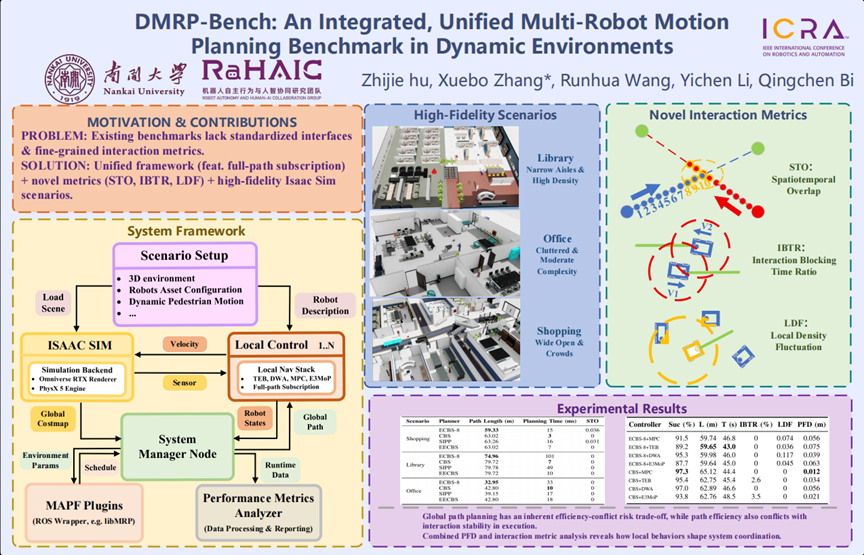
DMRP-Bench:动态环境下集成统一的多机器人运动规划基准
动态环境下的多机器人运动规划对安全高效的协调协作提出了严峻挑战,然而现有基准缺乏标准化的接口与细粒度的交互评估指标,难以公平、深入地评估多样化算法。为此,本文提出DMRP-Bench——一个集成统一的基准框架。在框架设计上,DMRP-Bench引入全路径订阅机制,取代传统的逐目标分发,实现了全局与局部规划器间模块化插件式的标准化集成,显著提升了局部控制的响应性与执行连续性。在评估方法上,本文提出一套新颖的细粒度交互指标,通过量化潜在路径冲突、交通拥堵时间与局部密度波动,精准捕捉机器人间的协调风险与交通动态;进一步结合路径执行保真度,实现了对局部行为如何影响系统级协调的定量诊断。在基于Isaac Sim构建的高保真动态场景中,对16种规划器组合的广泛实验不仅揭示了轨迹效率与交互稳定性之间的关键权衡,我们相信该基准将为多机器人系统的交互评估与行为诊断提供可靠的解决方案。
Z. Hu, X. Zhang*, R. Wang, Y. Li, and Q. Bi, “DMRP-Bench: An Integrated, Unified Multi-Robot Motion Planning Benchmark in Dynamic Environments”, IEEE International Conference on Robotics and Automation (ICRA), 2026.
ICRA(International Conference on Robotics and Automation)是机器人领域规模最大、影响力最广的顶级学术会议,由IEEE机器人与自动化学会主办,被誉为机器人领域的“奥运会”。自1984年在美国亚特兰大首次举办以来,ICRA已走过四十余年的历程,每年吸引全球数千名顶尖学者、工程师和学生参与。该会议涵盖机器人控制、感知、规划、学习、人机交互、自动化系统等广泛研究方向,是展示前沿成果、推动学科发展的重要平台。参与ICRA不仅能够紧跟国际研究热点,深入了解最新技术趋势,还能与来自世界各地的同行开展深入交流与合作,拓宽学术视野,提升研究团队在国际学术界的影响力和知名度。